在线会议
在线会议 论坛
论坛 专题
专题 工控直播
工控直播 新闻中心
新闻中心 子站
子站 技术
技术 社区
社区

利用中达CNC数控系统强大的轴控功能和台达伺服系统快速精准的运动响应,使绕线机的工作效率得到了很大的提高。
本文主要介绍了数控定子绕线机功能的需求www.cechina.cn,以及系统操作界面和I/O的规划。
一、前言

图1 数控定子绕线机外观
目前绕线机的市场可谓庞大,品种繁多,有平行绕线机、环型绕线机、定转子绕线机、纺织绕线机等。本文主要介绍的是利用中达CNC数控系统和伺服产品构建出的设备:数控定子绕线机。他的最大特点是可以自动变换绕线方向,所绕的线圈整齐且圈数准确。操作简便CONTROL ENGINEERING China版权所有,节省人工,提高产量,产品品质好,其绕线、排线、停车、换槽,完全按程序自动执行。排线宽幅可调,圈数准确。生产速度快,并大量节省线材。下面概述如何利用中达的数控和台达的伺服整合此方案。
二、技术和精度要求
客户原用PLC+伺服控制整台设备,因其加工出来的产品的合格率较低,且一些功能无法实现,满足不了市场上需求,故提出开发数控定子绕线机,并且需要控制系统和伺服满足如下条件:
1.伺服运动轴
在机械上,需要三轴的控制坐标系。其中,排线X轴采用伺服电机直接驱动螺距为4mm的滚珠
此外,对于飞叉轴来说,由于在运动过程中,机械负载惯量会因为绕线的速度的不同而发生较大的变化,这就要求伺服系统具有优异的稳定性、相应性和对负载变化自适应能力。
2.精度要求
机械回零精度:排线轴0.005mm 飞叉轴+/-1度 分度轴+/-1度
定位精度:0.02mm +/-1度
要求控制系统和伺服系统能够具有检测反馈,来保证机械运动精度。
3.CNC控制系统
因定子绕线机不仅讲究绕的匝数要准确,而且排线出来的密度要均匀www.cechina.cn,即最少需要两轴之间做插补运算,实现联动;画面可以自由规划;要给客户方便传输加工程序www.cechina.cn,并且可以对NC程序编辑和存储;控制系统要提供一个D/A口,实现恒张力控制功能。
另外,客户希望数控系统再开放一个轴,以备后用。
三、方案可行性分析
通过对机械设计和控制技术的要求分析,确定采用一台中达电通通用的四轴H4-4上位机控制系统+3套台达B系列交流伺服ASD-B做下位机控制的控制架构。
具体分析如下:
1.中达电通通用数控H4的主要特点:
(1)独立的伺服接口,可以实现多轴联动。
(2)电压命令型(V-Comnand)伺服接口,最小解析精度0.001mm,可配合光栅尺或旋转编码器实现闭环、半闭环控制,能够满足精度要求。
(3)最大响应速度500KPPS编码器反馈,能够满足快速定位的要求。
(4)控制器内存512K的存储空间,可存储1000个NC加工程序,配合标准的CNC键盘可以轻松的编写加工程序。
(5)通过CNC简易I/O控制命令和内制PLC开发,能够灵活的实现辅助机能。
(6)内置可编程PLC,标准配置为24INPUT/16OUTPUT,最大可以在增加32INPUT/32OUTPUT。
(7)2组D/A输出,2组A/D输入,完全可以满足实现恒张力的控制要求。
通过比较分析,完全可以满足做为上位机的控制要求。
2.台达交流伺服系统的主要特点:
(1)具有多种控制模式,可与上位控制器灵活配合,应用广泛。
(2)具有位置P-CURVE和速度S-CURVE功能。
(3)强健式的控制模式,在负载惯量大范围的变化时,系统仍然可以保持优异的性能。
(4)丰富的软件功能,方便用户调试。
通过比较分析,台达交流伺服系统完全可以满足做为下位机的控制要求。通过对机械结构、负载惯量、输出扭矩的分析计算,故选用:ASDB 400W*1颗、ASDB 750W*2颗做为下位控制器。
四、功能设计
1、系统架构
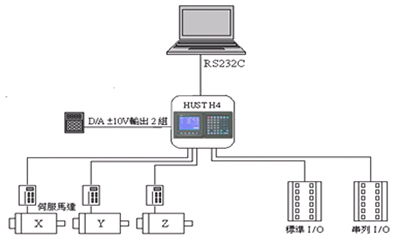
图2 系统架构
2、外观和功能需求
绕线机具有寻原点、点动模式、单次模式、自动模式、编程模式、参数设定、测试输出点功能等多项功能。
(1)系统操作界面规划
操作界面主要分为以下几个功能区块:
开机画面:
图3 开机画面
系统在上电后,进入此画面。此时为待机状态,画面的最下一排是功能显示区。
原点模式:
当画面在原点模式下,分别按下X、Y、Z功能键,在按下启动键
可以顺次执行回原点;或者可以按下X&Y&Z功能键,在按下启动键三轴同时回原点。
图4 原点模式画面
手动模式:
到进入手动模式后,可以分别按下X、Y、Z三轴按键,在按下 可以实现前后移动或正反转。速度值的大小可以设定。

图5 手动模式画面
.jpg) 立即获取Fluke在线红外热像仪解决方案白皮书
立即获取Fluke在线红外热像仪解决方案白皮书 2025电子及半导体智能制造创新高峰论坛
2025电子及半导体智能制造创新高峰论坛.jpg) 电机与变频驱动故障排除白皮书免费下载
电机与变频驱动故障排除白皮书免费下载.jpg) 每个联接都经得起时间考验-Moxa有奖调查
每个联接都经得起时间考验-Moxa有奖调查.jpg) AVEVA InTouch Unlimited试用版下载
AVEVA InTouch Unlimited试用版下载